10.4.3.9. TONL
10.4.3.9. TONL
If the new locations of the 3 reference steps are measured with the external detection device (RS232C port) such as visual device as shown in Fig. 10.7, and each shift is transmitted to the robot controller, the robot controller will use the 3 reference points and 3 shifted points to calculate the absolute location or shift. This is the function to execute and play the location calibration for the steps between TONL start and end.
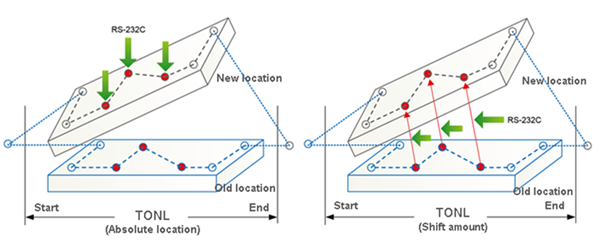
Figure 10.7 Online coordinates conversion
Explanation | Online coordinates conversion (shift amount) | ||
Grammar | TONL SFT=<Receipt format>, ST=<start/end>, <ref.step num.1>, <ref.step num.2>, <ref.step num.3> | ||
Parameter | Receipt format | Data receipt format. 0=Absolute coordinate, 1=Shift | 0~1 |
start/end | If 1, coordinates conversion begins. If 0, coordinates conversion ends. | 0~1 | |
ref.step num. | Steps to be assigned as the three standard points | 0~999 | |
Example | TONL SFT=0,ST=1,S1,S5,S7 | ||
Note | To execute this function, SREQ statement is required before TONL statement. This function receives the new locations of the 3 reference steps in 3 absolute location or shifts to calculate the shifts. | ||