10.4.3.24. CalXLine
10.4.3.24. CalXLine
Explanation | This function is to acquire the point on the linear line, where one linear line consisting of 2 points meets with another liner line consisting another 2 points in the shortest distance | ||
Grammar | CalXLine <Linear line reference pose1>,< Linear line reference pose2>,< Linear line reference pose3>,< Linear line reference pose4>, <Result pose> | ||
Parameter | Linear line reference pose 1 | First reference pose to calculate the fist linear line | |
Linear line reference pose 2 | Second reference pose to calculate the fist linear line | ||
Linear line reference pose 3 | First reference pose to calculate the second linear line | ||
Linear line reference pose 4 | Second reference pose to calculate the second linear line | ||
Result pose | The cross pose, where the liner line that connects the two lines in the shortest distance cross the first linear line. | ||
Example | CalXLine P1,P2,P3,P4,LP1
| 'Put into LP1 the cross pose, where the linear line, which connects the linear line that consists of P1 and P2 to the linear line that consists of P3 and P4 in the shortest distance, cross the first linear line. | |
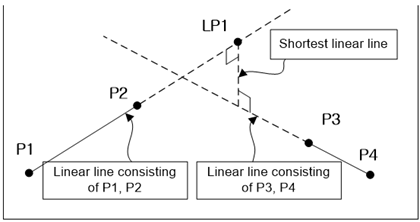
Figure 10.12 CalXLine usage

l Useful when used in setting the user coordinate system while used together with the touch sensing function of the arc welding function.