10.4.3.3. MKUCRD
10.4.3.3. MKUCRD
This function creates a user coordinates system based on three poses.
Explanation | This is the function to generate the user coordinate with 3 (or 1) poses | ||
Grammar | MKUCRD <coord. number>,<origin pose>,<X dir. pose>,<XY plane pose> | ||
Parameter | Coord. number | User coordinates system to be created | 0~10 |
Origin pose | Pose at the starting point |
| |
X dir. pose | Pose on the axis X |
| |
XY plane pose | Pose on the XY plane |
| |
Example | MKUCRD 1,P1,P2,P3 MKUCRD 1,P1 (When you designate only 1 pose, the coordinate is designated in the location/direction of the pose) | ||
The user coordinates system function is that a user sets a coordinates system in a certain position, and manual manipulation or shift manipulation is available on the set user coordinates system. Also, step position can be taught based on the user coordinates system.
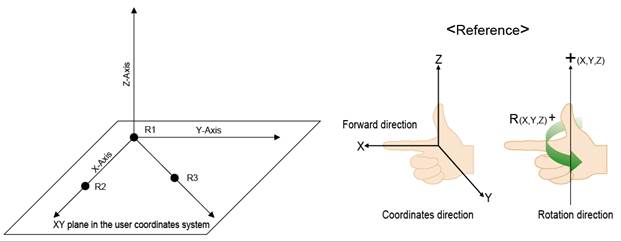
Figure 10.4 User coordinates system

l 『E1010 Number of teaching step is insufficient』
This warning occurs when steps recorded in the teaching program for coordinates system registration are less than three. There should be three teaching steps in the assigned program.
l 『E1011 Recorded dots are too close』
This warning occurs when the distance between the three points in the teaching program is less than 1mm. teaching steps should be corrected.
l 『E1012 Recorded dots exist on a straight line』
This warning occurs when the three points recorded in the teaching program for coordinates system registration are almost on the same straight line. In this case, the direction of each axis in the user coordinates system cannot be determined. The teaching program should be checked.
l 『Check coordinate system / Jog status [Any]』
When a user coordinates system is selected (『[F7]: Condition setting』 → 『9: Select user coordinate』), if the coordinates system is set as an axis or tool coordinates system, or a robot is in jog operation, user coordinates system cannot be selected and changed.