10.4.3.5. SEA
10.4.3.5. SEA
The search function is for detecting the difference of workpiece position and compensating the difference. Not only robot coordinates system but also tool coordinates system and base coordinates system can be used as the standard to detect and compensate the position difference.
Explanation | Search function | ||
Grammar | SEA ST=<On/Off>, CRD=<Reference coordinate>[,<User coordinate number>] ,R=<register number> | ||
Parameter | On/Off | If 1, on. If 0, off. | 0~1 |
Reference coordinate | 0=Base, 1=Robot, 2=Tool, 3=User, 4=User n | 0~4 | |
User coordinate number | User coordinate number when reference coordinate is used | 0,1~10 | |
Register number | Number to be used for online shift | 1~8 | |
Example | SEA ST=1,RF=0,R=1 | ||
(1) Assign search range. (From 『[F7]: Condition setting』 menu 『[F1]: App. cnd』 → 『2: Search Range』)
(2) Perform program teaching and set the search function for teaching.
① Search start
② Robot interrupt (RINT or RINTA)
③ Search end
④ Online shift
(3) Set search standard position record ‘ON.’ From 『[F7]: Condition setting』 menu 『[F1]: App. cnd』 → 『1: Search reference pose record』)
(4) Operate the program in the 1Cycle Mode to retrieve the standard position of workpiece through robot interrupt.
(5) Set search standard position data record ‘OFF.’ From 『[F7]: Condition setting』 menu 『[F1]: App. cnd』 → 『1: Search reference pose record』)
(6) Operate the program ordinarily.

l Application of the search function
① One-dimension search
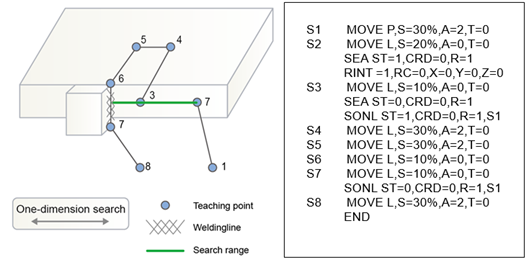
Figure 10.5 One-dimension Search
Figure 10.5 shows the error is corrected by one-dimension search when workpieces of the same kind or of the same shape and different size move.
The search function is used with robot interrupt as shown above. The difference in shift amount is corrected by the online shift function after the amount is recorded in shift register.
In the figure above, shift amount is recorded in shift register through robot interrupt operation while moving to the step 3. By referring to this shift register, step 4 ~ step 7 are shifted and operated. Also, the robot interrupt function is used with interpolation record step.
② Two-dimension search
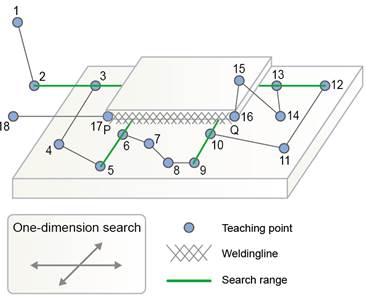
Figure 10.6 Two-dimension search
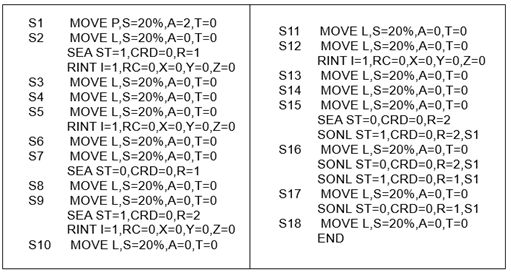
Two-dimension search records shift amounts of each point (P and Q) by using the search function twice. The shift amount of point P is stored in R1 register and referred to when P is shifted. The shift amount of point Q is stored in R2 register and referred to when Q is shifted.