4.7.6. Mirror image
4.7.6. Mirror image
A program which sets the position of Axis S and that of wrist axis symmetrical can be drawn up. (Y-Z plane is the center of the symmetry.)
Mirror Image is useful when the same motions (including body welding of vehicles, etc.) for two robots on the opposite sides are required. After teaching a program to one robot, the other one on the opposite side retrieves and converts the program by using Mirror Image. Then, a new program which sets the symmetry about Axis S is created.

Figure 4.12 Source program → Converted program by using Mirror Image
(1) Selection 『[F1]: Service』 → 『6: Program conversion』 → 『6: Mirror image』.
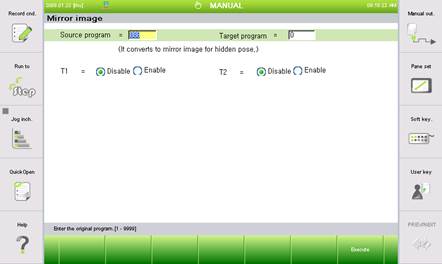
(2) Input data, press 『[F7]: Execute』.
n Source program: Number of the source program
n Target program: Number of a program to be created by using Mirror Image
n T1: Set as <Enable>, if the Mirror Image conversion of main axis is needed.

l If any axis exceeds soft limit in the process of Mirror Image conversion, such axis will be indicated in ‘Range exceeded steps.’
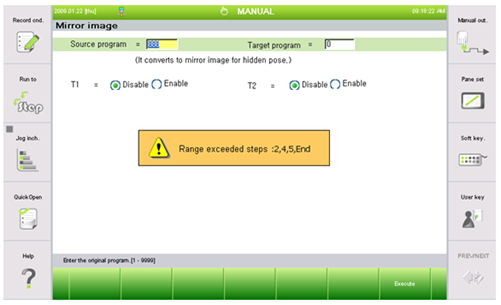
If ‘Range exceeded steps’ indicates ‘End,’ it means review is over. If ‘Range exceeded steps’ indicates ‘=>,’ it means there are more steps exceeding limit.
l Check which axis exceeds soft limit in person, and adjust it.
l Use the Mirror Image function for the same type of robots, because soft limits are different according to each robot type.
l Set the standard position of encoder and 0 degree position of each axis to be the same for the robots on the both sides.
l Use symmetrical guns and tools, or attach guns and tools symmetrically.