3.6.4. Comm(Communications) Tab
3.6.4. Comm(Communications) Tab
This sets the communication method with the Hyundai Robot controller.
You can select one between the RS-232 communication and Ethernet communication.
RS-232C Serial | Ethernet |
|
|
When you click on each communication method, it is activated and the color changes to the following color.
When deactivated, the color changes to gray and you cannot set the internal parameter.
Communication method | Activated | Deactivated |
RS-232 |
|
|
Ethernet |
|
|




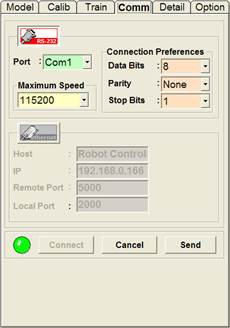
n RS-232
It communicates with the Hyundai Robot controller with the RS-232 serial communication method.
- Port : This selects the communication COM port.
- Maximum Speed : This sets the communication speed.
- Data Bits : This sets the data bit.
- Parity : This sets the parity bit.
- Stop Bits : This sets the stop bit.
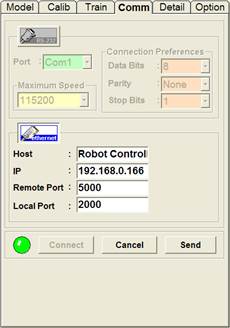
n Ethernet
- HOST : Enter the host name to connect.
- IP : This sets the IP address of the server to connect.
- Remote Port : Configure the port for the robot controller.
- Local Port : This sets the port of the computer.
n Connect
This executes the communication connection with the Hyundai Robot controller with the selected communication method.
n Cancel
This cancels the connected communication.
n Send
To check the connection with the Hyundai Robot controller, this sends the character string of “Connected” to Hyundai Robot controller.