10.4.6.2. PALPU
10.4.6.2. PALPU
The PALPU statement is the function to shift a workpiece up to the inputted height after picking up the workpiece while palletize job is executed. This function executes the optimal palletize path in comparison to the current height of stages to be piled.
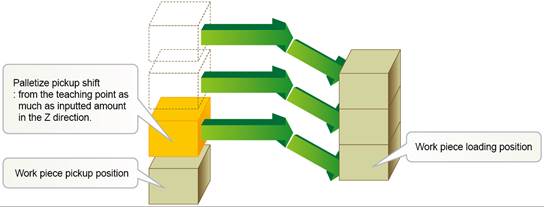
Figure 10.13 Palletize pickup shift
Explanation | Palletize pickup shift | ||
Grammar | PALPU P=<pallet num.>,SL=<start layer >,SH=<amount of shift> | ||
Parameter | pallet num. | Pallet entry number | 1~16 |
start layer | Number of stages to start pickup (1-base) | 1~100 | |
amount of shift | Shift value when picking goes up | -2000.0~2000.0 | |
Example | PALEND P=1,SL=4,SH=1000 | ||
Note | This function always should be between PAL(M96) and PALEND(M97). | ||

l To use this function, the palletizing must be set to <Enable> in 『[F2]: System』 → 『5: Initialize』 → 『3: Usage setting』item.
l Before using this function, always check the data value in 『[F2]: System』 → 『4: Application parameter』 → 『3: Palletizing』 → 『1: Palletize pattern register』. When the setting value is incorrect, the robot may execute unwanted work.
l This is reflected to step of which step option is PU.