4.6.2. Pattern Origin Setting
4.6.2. Pattern Origin Setting
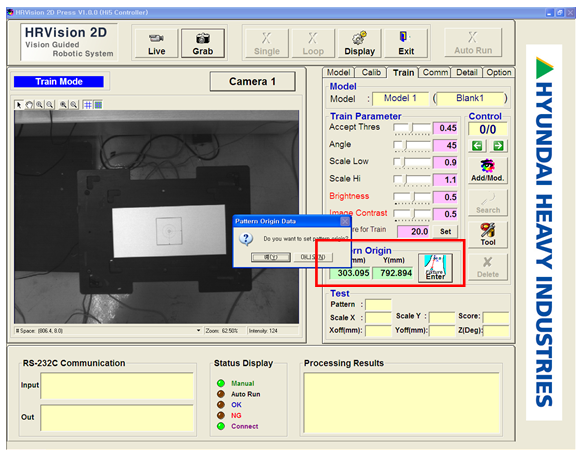
This sets the origin of the pattern to register. Enter the “Pattern Origin” for the 4.5 “Blank Grip Location Teach” and click the “Enter” button. If the camera has been calibrated, the camera coordinate system is identical to the robot coordinate system. Therefore, the robot coordinate system data entered can be used in the image coordinate system.