4.5. BlankGrip Location Teach
4.5. BlankGrip Location Teach
Place the workpiece on the conveyor (or palette), calibrate the Hyundai robot, and enter in the robot work program the position to grip the blank.
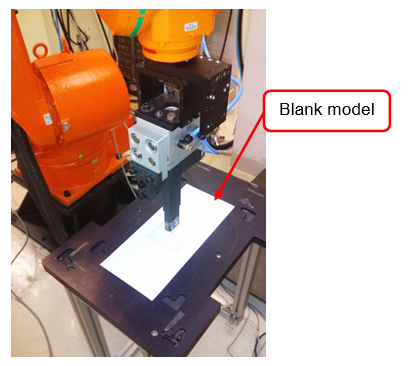
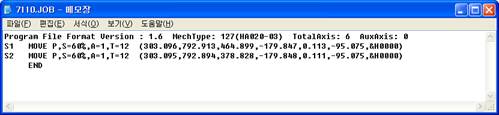
Place the workpiece on the conveyor (or palette), calibrate the Hyundai robot, and enter in the robot work program the position to grip the blank.