7.6.2. Positioner calibration
7.6.2. Positioner calibration
The positioner calibration function allows the robot to perform tracking or perform linear or circular operation corresponding to a jig through the synchronization with the operation of the jig installed outside the robot. The external jig unit, which will be applied for the positioner calibration, is called positioner or station.
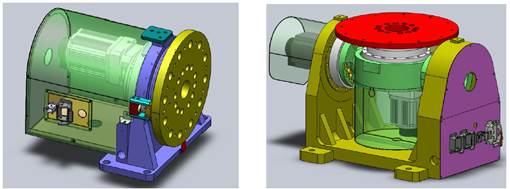
[1 axis positioner] [2 axes positioner]
Figure 7.94 Axis 1 and 2 positioners
When this function is applied, it is possible to compensate for the difficulties in work due to restrictions of the working area. The positioner is designed to allow a workpiece fixed on the positioner to move with the positioner. The robot tracks the movement of the positioner and performs linear or circular operations on the workpiece.
The specifications of the key functions are as shown below.
Table 7‑4 Specifications of positioner functions
Specifications of key functions | Features |
Positioner group | Support for 1~4 groups |
Number of axes of a positioner | Support for a positioner with 1 axis or 2 axes (rotational axis) |
Interpolation method | Support for linear and circular interpolation |
External input independent jog (SELSTN) | Support for the jog operation regardless of the robot for a positioner selected in auto mode. |
External input independent playback (AXISCTRL) | Support for the independent playback (Move) function regardless of the robot for a positioner selected in auto mode. |
This function can be used when the positioner group is set.
In order to set the coordinate for the positioner, the positioner calibration will be performed simply through a 3-point teaching for a 1-axis positioner and a 5-point teaching for a 2-axes positioner.
For details, please refer to 『Hi5a Controller Positioner function manual』.