7.6. Auto calibration
7.6. Auto calibration
Auto calibration uses a teaching program or auto movement to find the axis origin, tool length, overload mass, and base axis direction to achieve the proper robot usage calibration.
Values calibrated by this function are reflected automatically in the robot.
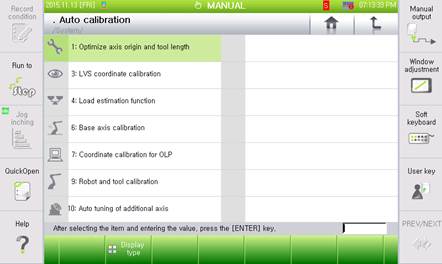
Figure 7.91 Auto calibration setting items
7.6.1. Optimize axis origin and tool length
7.6.3. Laser vision sensor coordinate calibration
7.6.4. Load estimation function
7.6.5. Common coordinate of cooperate robots
7.6.7. Coordinate system calibration for OLP
7.6.8. Gravitation direction automatic setting