4.1.3. Cartesian spaces
4.1.3. Cartesian spaces
Cartesian space could be defined working space or protected space for monitoring tool area. Working space means the limited space where the tool can move freely but cannot leave. Otherwise, protected space is the limited space where the tool cannot enter and move.
Cartesian space could be configured up to 12 spaces with position of origin and length in world coordinate system. Each space should be configured including stopping distance. Each space can be activated by parameter setting or Safety I/O.
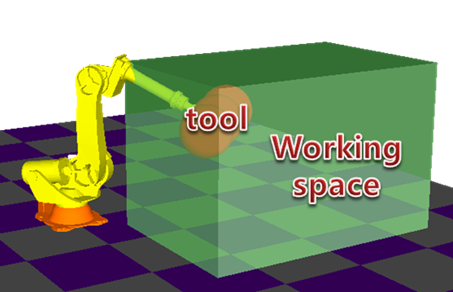
Figure 4.2Cartesian working space
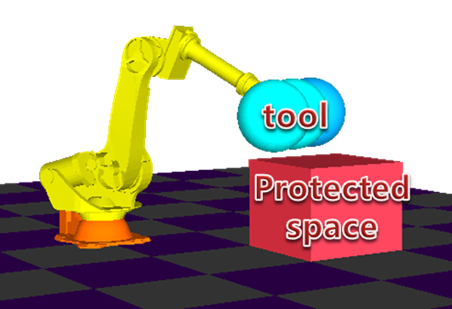
Figure 4.3Cartesian protected space
TCP speed configured in cartesian spaces also be monitored. If the TCP speed exceeds limit value of activated space, STO will be triggered.
When the spheres of tool violate the cartesian space, the reaction will be according to configuration of stop at bound. If the stop at bound is on, STO will be triggered and robot will be stopped. If not, robot will not stop and send alarm to safety PLC.
Table 4‑3 Cartesian space parameters
Cartesian space parameter: 12 Spaces | |||
Parameter name | Parameter name | Parameter name | |
Name | Name string | Max. 24charaters. Default=“Cartesian Space n“ ※ Used in the HRSafeSpace only. Name is not transferred to the SafeSpace from the robot controller. | |
Type | 0,1 | 0=Working space(Default) 1=Protected space | |
Activation | 0~2 | 0=Always Off(Default) 1=Always On 2=Safety I/O | |
TCP speed max. | 1~30,000 (mm/s) | Limit of Cartesian TCP speed Default: 30,000 | |
TCP speed monitoring | 0,1 | Monitor TCP speed when the tool is 0= inside of the space 1= outside of the space | |
Stop at bound | On/Off | Off=don’t stop On =stop(default) | |
Properties | |||
Origin | X | -30,000~ 300,000 (mm) | The origin of the space Default: 0 |
Y | |||
Z | |||
RX | RX,RZ: -180~180(°) RY:-90~90(°) | The direction of origin Default: 0 | |
RY | |||
RZ | |||
Length | LX | 60,000 (mm) | Lengh in X, Y, Z direction Default: 0 |
LY | |||
LZ | |||
