4.2. Release STO function
4.2. Release STO function
If the robot violates the safety parameters, the SafeSpace triggers STO and robot will be stop. The operator should check the robot and safety parameters. After that, the operator should release STO function and move the robot to safe area.
In SafeSpace monitoring menu, you can monitor the violation of configured spaces. Also you can release STO caused by violation and move the robot to safe area with manual mode. The status would be updated in real time.
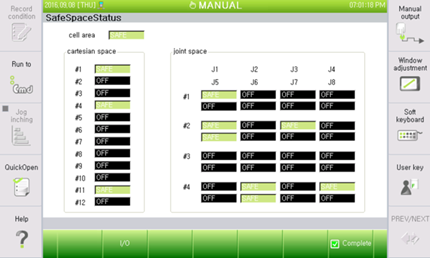
Figure 4.8SafeSpace Status
When the STO triggered, the error messages would be occurred in teach pendant and expressed at I/O page in SafeSpace monitoring menu. You can check the reasons of STO and maintain the robot.
In I/O page, there are status and assignment of input/output signals.
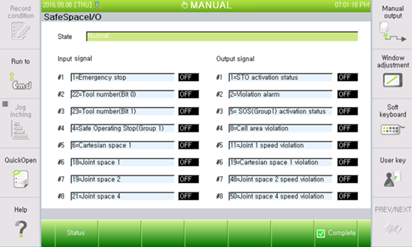
Figure 4.9SafeSpace I/O