2.6.1. Example of part assembly
2.6.1. Example of part assembly
This example can be used as reference to assemble parts using the force control function. Modify the parameters and conditional statement according to your conditions.
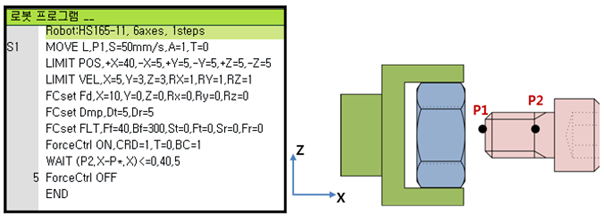
Figure 2.9 Example of part assembly program
Table 2‑1 Example of part assembly program
Robot motion | § Moves to the position P1 saved in S1 and then starts the force control. § Once the force control starts, it starts to move P2 in order to reach the force set in the X direction of the robot coordinate system. § When the robot reaches P2, it determines that the assembly is over, so its exits the program. |
Max. operation area (LIMIT POS) | § Sets the force control range based on the robot coordinate system. § X=-5–40 [mm], Y=-5–5 [mm], Z=-5–5 [mm] |
Max. operation speed (LIMIT VEL) | § Based on the robot coordinate system (given that Force Ctrl ON, CRD=1) § X=5 [mm/s] § Y, Z = 3 [mm/s] § RX, RY, RZ = 1 [deg/s] |
Size of force to control (FCset Fd) | § It is controlled to maintain the force of Y, Z, Rx, Ry, Rz = 0 : 0N. § X=10 [N]: A 10 N contact force is maintained in the X direction of the robot coordinate system. To assemble, set the size of the force considering the friction between parts. |
Robot conditions for force control (FCset Dmp, FLT) | § Dt=5, Dr=5: 5-step flexibility control in all directions § FLT: Flexible control with Ff and Bf values. Smaller value results in smoother motion, but they can be accompanied with the delay. |
ForceCtrl ON, CRD=1, T=0, BC=1 | Execution of force control § CRD=1: Force control operation based on the robot coordinate system (1) § T=0: Force control tool data No. 0 is used. § BC=1: Initializes the force sensor data to start the force control |
WAIT (P2.X-P*.X)<=0, 40, 5 | § The force control is performed until the difference is 0 or less between P*.X (current X-directional position of robot) and P2.X (X-directional position of the robot with the completed assembly). § 40, 5: If the condition is not met within 40 seconds, move to line No. 5 (Force Ctrl OFF) to exit the force control. |
ForceCtrl OFF | End of force control |