8.7.1. Overview of the STITCH function
8.7.1. Overview of the STITCH function
Stitch welding is a function for performing welding intermittently, like sewing. Figure 8.23 shows stitch welding in which the starting and end points are set on the specimen for the stitch welding to be performed. It will be done in a stitch pattern where welding section “a” and nonwelding section “b” are set, as shown in Figure 8.22.

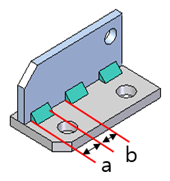
Figure8.22 Basic parameters for the STITCH function
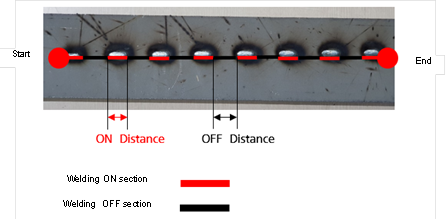
Figure8.23 Stitch welding test specimen
Figure 8.24 presents a schematic diagram illustrating the stitch welding process. In line with the recording, the robot will move from position P [1] to P [4]. The P [2] and P [3] sections are for stitch welding, which will be performed through the “STITCH ON” and the “ARCON” command at the P [2] position. After moving to the P [3] position, the robot will execute the “STITCH OFF” and “ARCOF” commands to finish the procedure. After the work is completed, the robot will move to the next step, P [4].
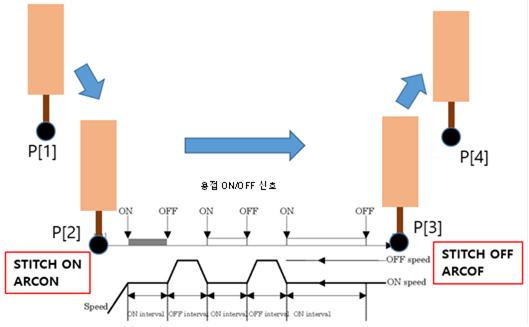
Figure 8.24 Stitch welding process