7.3.9. Maintain current reduction
7.3.9. Maintain current reduction
This function reduces the gravity load of robot motor in the static position.
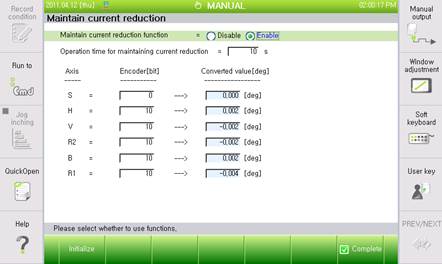
Figure 7.41 Holding current reduction setting screen
n Maintain current reduction: Function is activated when [Enable].
n Operating time for maintaining current reduction
When the robot is in standby and operation time exceeds the current reduction time, the current reduction function is enabled. If you set this time too short, it can operate frequently even during robot operations to increase the cycle time.
n Encoder and Converted value
Operation per axis when the current reduction function is in effect. Angle converted value is automatically calculated to the set encoder value. If the angle converted value is high, the operating distance of the tool end increases. Set the encoder value appropriately.

When the start is entered while the maintain current reduction function is operating while the robot is in wait mode, the maintain current reduction function will be completed and the robot will start. This takes 1-2 seconds and this delay time can be a problem when the robot must move in synchronization with the external system. When this problem occurs, you must change the Maintain current reduction function to “Disable”.