7.3.6. Accuracy
7.3.6. Accuracy
Review the 2.5 Step section first to understand this section. This section provides the values of the accuracy level that was explained in the 2.5 Step section.
The accuracy level can be set within the range from 0 – 7, and the level will be recorded as one of the parameters of the step. Except for the accuracy level 7, the TCP distance and posture values as well as the additional axis distance and angle values can be entered in each level (Picture below). If a robot does not provide support for the linear or circular interpolation, just like the case of a LCD robot, the same method as that for the additional axis will be applied.
When the accuracy level 7 is used, the maximum cornering path that can meet the condition of being 1/2 of the step distance will be created. The value for a level is calculated automatically in the controller, not to be entered directly. Generally speaking, the accuracy level 7 is useful when it is required to operate the robot with the most smoothness but also with swiftness. For example, when it is used for the air cutting step for the spot welding pattern, or the entry/exit of the LCD hand, more smoothness and swiftness in its operation can be acquired.
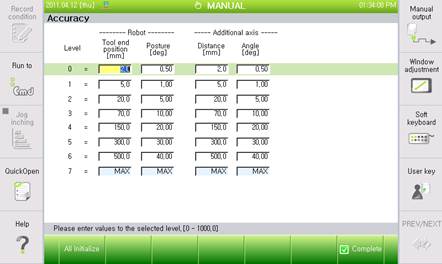
Figure 7.36 Accuracy setting screen

l For the GUN step, the controller automatically controls the limit irrelevant from the accuracy level set.