7.3.4. Encoder offset
7.3.4. Encoder offset
You can set the current location of the encoder as the zero point location of the encoder (0X400000 locations). Decide the zero point of the encoder from the reference location (Location where scale is attached for each axis) of each axis of the robot.
Because this value is set as factory default value, reset it as needed for cases such as motor, encoder exchange etc.
Operate each axis of the robot to set the offset value of the encoder. The recorded encoder value is hexa-decimal value.
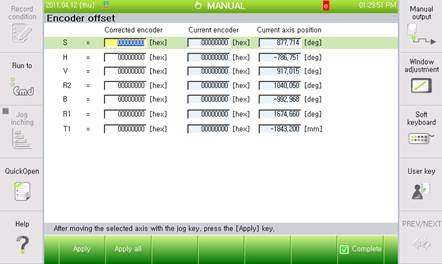
Figure 7.34 Encoder offset screen
If you need to back up the current task program and execute 『[F2]: System』 → 『5: Initialize』 → 『1: System format』for any reason during the task, the robot must be maintained at the same location as the reference location prior to the resetting. For this, write down the encoder offset value and enter the value to use it. You can enter the calibration value by opening the soft keyboard on the right side of the screen and directly entering as hexa-decimal value.