2.3.5. Step Forward/Backward
2.3.5. Step Forward/Backward
The step forward/backward function refers to the playback of the recorded program in the manual mode. This function is used to check, within a safe speed range, the path of the recorded programs and their mutual interlocking relationship.
In the step forward/backward operation, there are totally 3 different modes depending on the unit of execution.
Execution Unit Cmd: Execute the program line by line
Execution Unit Step: Execute the program step by step
Execution Unit End: Execute the program to the end command
When Cmd or Step is set as the execution unit, the robot will reach the recorded step regardless of the set accuracy region. When End is set as the execution unit, the operation will take place along the same path as that of the playback in the automatic mode.
When the step forward/backward activity is to be executed in the Cmd/Step mode, the robot will be activated along the path without cornering as shown in the following picture. More detailed information regarding the cornering is illustrated in 7.3.6 Accuracy.
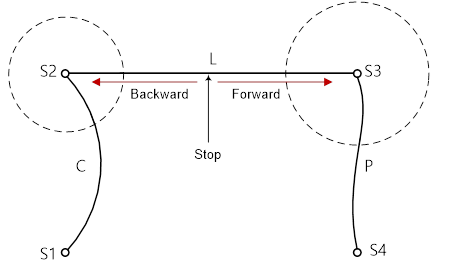
Figure 2.24 Cmd/Step mode playback forward/backward path
When the step forward/backward activity is performed in End mode, the path for the robot will vary depending on the stop position as shown in the following picture. In other words, when the robot tries to move forward after stopping at a location, while not cornering, the path for the cornering will be recovered. However, when moving backward is tried, the movement to the recorded step will be made. Then, the robot will stop at the recorded step, and, right after it, will move back to the previous step. When trying to move forward/backward after the robot stops while cornering, the robot will maintain all the previous paths. However, when the robot moves backwards, it will stop at the cornering starting point automatically, and, then, the relevant step of the TP screen will show ‘a’ (Refer to the TP screen hereinafter).
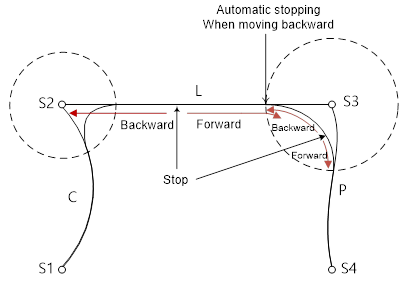
Figure 2.25 End mode playback forward/backward path
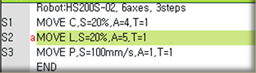
Figure 2.26 The state in which the automatic stopping occurred at the cornering start point after the backward movement during the cornering.
When the robot tries to move forward after stopping at a corner, the robot will run along the original cornering path. In this situation, if the robot tries to move backward, and, while not reaching the previous step completely, tries to move forward again, the original cornering path will not be made in some cases as shown in the picture below. In other words, when the step distance is shortened than the original one, causing the conditions of accuracy not to be fulfilled, the cornering path will be made in a smaller scale than the original cornering path.
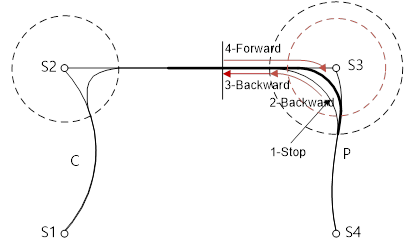
Figure 2.27 Changing of the path of the robot when moving forward after the step backward process.
The “Step fwd/bwd max. speed” and the “Function during step fwd/bwd” can be set in the menu for condition setting menu.
The “Step fwd/bwd max. speed” is the same as the one set for the manual speed.
There are 3 different methods, Off, On and I On, for setting the “Function during step fwd/bwd”.
Off : Functions will not be executed during the step forward/backward activity.
Regardless of the external I/O conditions, so only the path of the robot can be checked.
Attention is required as the interlocking with the external systems will not be activated
On : All the functions will be executed.
After the completion of the external interlock is used.
I On : Only the input wait function will be executed.
To be used to check the security associated with the external interlocking.