3.4.3. Welding sequence
3.4.3. Welding sequence
The setting of various sequences related to spot welding will be executed from this screen to determine robot operation according to the work environment.
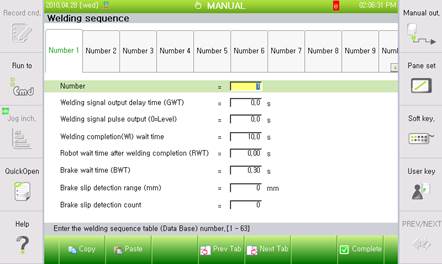
(1) Number
It selects the Welding Sequence Number, between Welding Sequence Number 1 and Welding Sequence Number 63.
(2) Welding signal output delay time (GWT)
For a Servo-gun, this is the wait time until welding (applied current) signal will be displayed after squeeze alignment is achieved.
For a air gun, this is the wait time until welding (applied current) signal will be displayed after the execution of SPOT command.
(3) Welding signal pulse output (0=Level)
This is an item for displaying welding (applied current) signal for a fixed time only. When this value is set to “0”, the signal will be displayed continuously until the welding complete (WI) signal is received.
(4) Welding completion(WI) wait time
This is wait time until the welding complete (WI) signal is received. When this value is set to “0”, the system will wait continuously until the welding complete (WI) signal is received.
(5) Robot wait time after welding completion (RWT)
This is the wait time for stick detection after the welding complete (WI) signal is received. If this is set to “0.0”, stick detection will not be carried out. It is recommended to use the value over “0.3 sec (300msec)” if the stick detection signal is used. However, if this value is too large, the welding time will be extended and cycle time will be increased.
(6) Brake wait time (BWT)
This inputs wait time until brake will be operated when executing spot welding using Stud-gun as a robot-gun.
(7) Brake slip detection range (mm)
This sets the range of detecting the remaining distance of each robot axis when executing spot welding by using Stud-gun as a robot-gun.
(8) Brake slip detection count
This displays a warning in the event that the number of detected brake leave exceeds the set value when executing spot welding by using Stud-gun as a robot-gun.