2.8. Positioner calibration command(PosiCal)
2.8. Positioner calibration command(PosiCal)
This command is for executing the positioner calibration necessary for the positioner to move in a synchronized manner with the robot. Generally, the positioner calibration is carried out through a setting dialogue box. However, when the positioner needs to be changed to a servo tool, the calibration needs to be changed during the robot operation. For the purpose of executing such activity on the program, the positioner calibration command (PosiCal) is used.
(1) PosiCal command
Table 2.3 PosiCal Command Parameter
PosiCal Prog=<Calibration Program No.>,Station=<Station No.> | ||
Calibration Program No | 1~9999 | Positioner calibration program number |
Station No. | S1~S3 | No. of the station to be calibrated |
(2) Example of the use of the positioner calibration command
- Connect between the positioner that needs to be calibrated and the robot.
- Prepare the positioner calibration program.
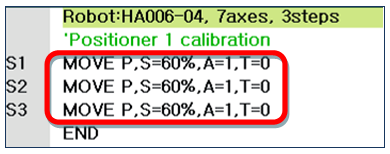
Figure 2.6 Axis Positioner Calibration Program
- Execution can be carried out by selecting 『Command input』 → 『Arc』 → 『PosiCal』and inserting the PosiCal command. Another way is to enter 『[F2]: System』 → 『6: Auto Constant Setting』 → 『2: Positioner Calibration』 dialogue box and carry out the positioner calibration using the prepared program.
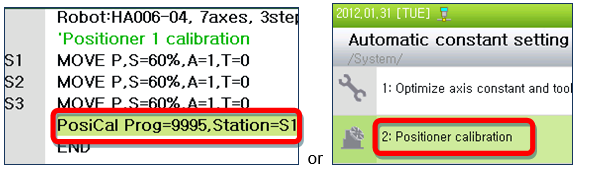
Figure 2.7 Execution of Positioner Calibration
- Check whether the positioner synchronization occurs normally, by operating the jog for the synchronized operation of the additional axis.
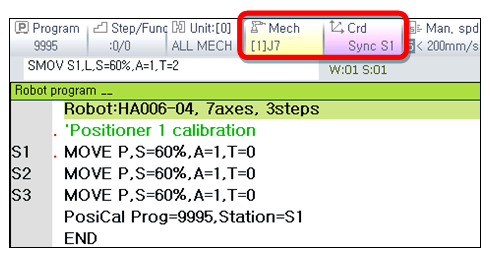
Figure 2.8 TP Screen When Positioner Synchronization Occurs
- Check whether the robot operates in an accurately synchronized way when the positioner rotates.
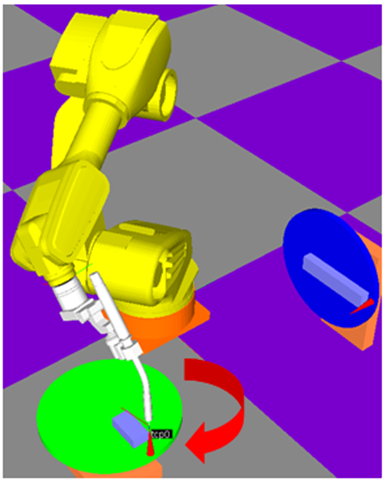
Figure 2.9 Checking Positioner Synchronized Operation
- In an actual work program, Change of a positioner occurs through the TOOLCHNG command, and then PosiCal is executed.
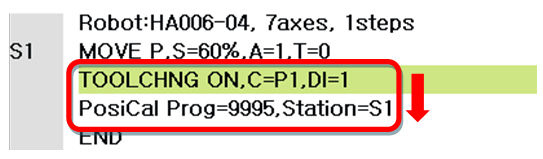
Figure 2.10 Example of Positioner Calibration Executed After A Tool Is Changed