2.7. Connection/disconnection timing
2.7. Connection/disconnection timing
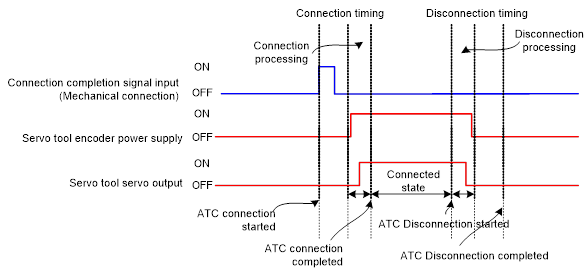
Figure 2.5 Servo Too Change Connection/Disconnection Timing
(1) Connection
While the connection command (TOOLCHNG ON) is being executed, if there is a mechanical connection between the robot and the servo tool, the connection completion signal will be received and the processing for the connection will be carried out internally by the controller. In addition, the encoder power supply and motor-on activities will be added to run the servo tool axis.
(2) Disconnection
The disconnection command (TOOCHNG OFF) will be carried out according to the reverse sequence of the connection process.