4.3.2. Preparing programs after splitting the work into blocks
4.3.2. Preparing programs after splitting the work into blocks
When needed to split the work into blocks for preparing programs, the below sequence needs to be followed
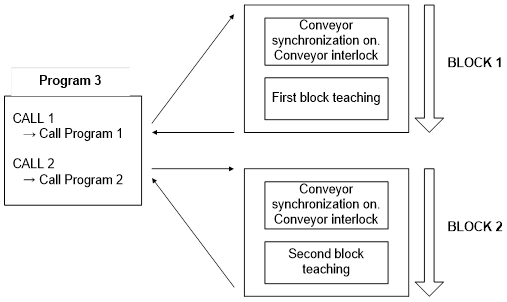
n Teaching for the first block
(1) Check whether the conveyor data are cleared.
(2) Move the conveyor to allow the limit switch to be activated by the workpiece, and then stop the conveyor when the teaching position is placed in front of the robot. The conveyor pulse counter and register values corresponding to the current workpiece position will be calculated.
(3) Carry out teaching for the workpiece at the current position and check the teaching by using the step forward/backward function.
(4) At the setting screen of System/Application Parameter/Sensor Synchronization/Service Environment, the sensor activation item needs to be set as <Test>. In the normal mode, if the conveyor data are cleared when the program ending is executed, signals need to be fed while the conveyor is working. For avoiding the situation, it is needed to select the test mode.
(5) Leave the workpiece at the current position and push the startup button to perform playback for checking.
(6) Record the CNVYSYNC, WAITCNVY command for Step 0.
n Teaching for the 2nd block
(1) Select and play back the final step of Program 1.
(2) Move the conveyor and stop it when the teaching position of the second block is placed in front of the robot.
(3) Select the manual mode and then select Program 2.
(4) Perform the teaching applying the same method that is used for first block.