4.5. Teaching for presssynchronization
4.5. Teaching for presssynchronization
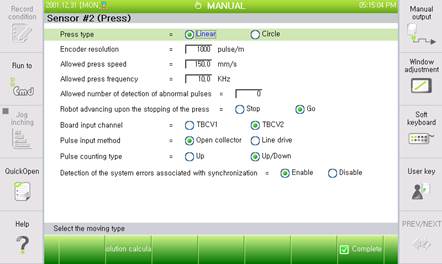
When it comes to press synchronization, the robot performs synchronization in line with the press speed. The synchronization is based on the assumption that the press speed is constant always, which means the synchronization performance will be degraded if the press speed varies. The current working speed of the press needs to be set at the allowable press speed on the above menu.
The following shows a program example that applies press synchronization
Step 1 SensorSync Sensor=1,Sync=1 WaitSensor Sensor=1,Sync=0,Pos=500 Step 2 MOVE P,S=60% Step 3 MOVE P,S=60% Step 4 MOVE P,S=60% SensorSync Sensor=1,Sync=0 Step 5 END |
→ Press synchronized playback on → Press interlock wait à Sensor 1 position registration à Sensor 1 position registration à Sensor 1 position registration → Press synchronized playback off
|
In the above program, teaching needs to be performed in a way that the sensor positions of the steps 2, 3 and 4 must be incremental. Otherwise, the following error would be generated.
E0239 The sensor position for the step does not increase sequentially.
In addition, the speeds recorded at the steps 2, 3 and 4 will be ignored, and speed needs to be planned based on the allowable press speed basically set by the user. Even when the highest speed is planned, if the positions of the sensor and the robot are recorded in a way to exceed the performance of the robot, the following error will be generated in the middle of operation.
E0238 Can not follow the sensor speed.