4.2. Synchronization program configuration
4.2. Synchronization program configuration
n Home-position wait
The robot will wait at the home position until the startup command is entered.
n Interlock wait
The robot will move to an area near the synchronized operation range in advance and wait until the workpiece travels a certain distance as recorded in the relevant command.
The following figure shows a painting program designed for a workpiece being transported on the conveyor. When the robot moves to Step 4, conveyor synchronization will start. When the robot moves to Step 5, paint will be sprayed on the workpiece in synchronized operation. In this process, the wait step (Step 3) needs to be recorded near the step for entering the synchronized operation range
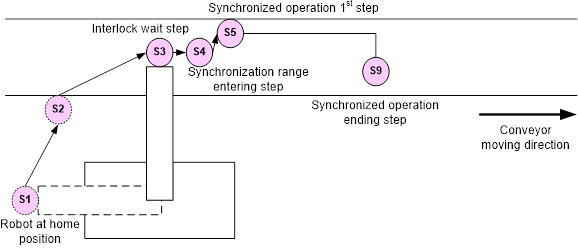
The above steps can be programmed as shown below.
Step 1 Step 2 Step 3 SensorSync Sensor=1,Sync=1 WaitSensor Sensor=1,Sync=0,Pos=500 Step 4
DO1 = 1 Step 5 ː Step 9 DO1 = 0 SensorSync Sensor=1,Sync=0 Step 10 ː Step 13 END | → Robot at home position
→ Interlock wait step → Conveyor synchronized playback on → Conveyor interlock wait → Synchronization range entering step → Paint spray signal on → Synchronized operation 1st step
→ Synchronized operation ending step → Paint spray off signal → Conveyor synchronized playback off
→ Robot at home position
|
n Synchronized playback
In the above figure, the conveyor synchronized playback range runs from Step 4 to Step 9. All the commands for this range are to be executed by being synchronized with the conveyor
n Back to home position
When completing one operation, the robot goes back to the home position and waits for the next startup command.