4.1. Concept of Model Hierarchy Structure
4.1. Concept of Model Hierarchy Structure
All objects inside the workspace are called a ‘model’ in HRSpace3. Car body, robot, tool, jig or recorded steps or coordinate systems are all types of models.
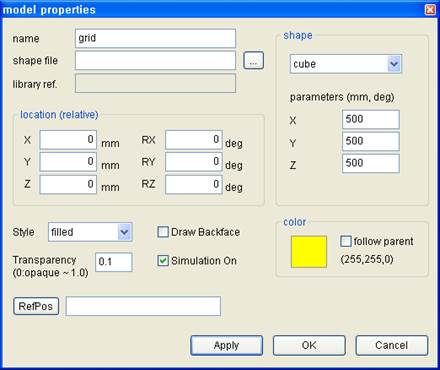
Each model has its own properties including name, location, shape, color, transparency etc. These properties can be edited by opening the model properties window as follows.
As shown in the following figure, there are models that inherits the properties from the basic model including link, robot, step etc.
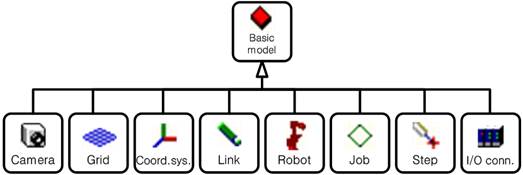
Inheriting the properties mean to have the basic model properties and additionally have own unique properties.
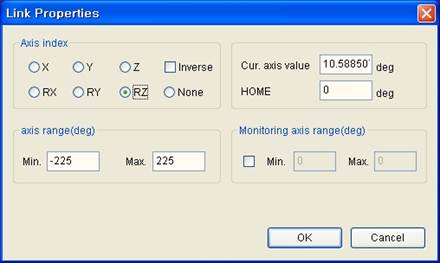
For example, the link model has the above model properties and additionally the following link properties.
A model form a hierarchical structure and is arranged inside the workspace. (Do not confuse with the above inheritance picture. The following hierarchy structure is a concept of ownership and not inheritance.)
If model B is located under model A, model A is the parent and model B is the child to form a relationship.
n Because the child model uses the location of the parent model as the origin, when the parent moves all the child models below the parent will move together.
(But, when setting the RefPos in model properties, the reference position is used as the origin.)
n When you delete the parent model, all the child models will be deleted together.
n When the parent model is copied, all the child models are copied together.
n When the parent model is saved, all the child models are saved together.
If you look at the hierarchy structure in the following picture, the cube is the child model of the tray and the dish is the child model of the cube.

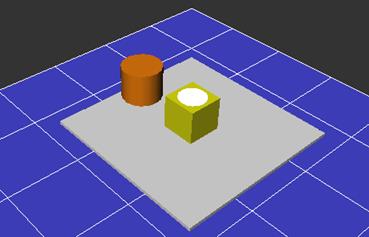
When you move the tray, the parent model, all the child models move as well.

On the other hand, when you move the cube, the dish, which is the child model, will move together but not the tray.

If you delete the cube, the dish, which is the child model, will be deleted as well.

The layout of the automation line to simulate is composed through the relationship among models as shown above, just different in complexity.