6.4.5. Replacing Axis-V Reducer [HA006L]
6.4.5. Replacing Axis-V Reducer [HA006L]
(1) Set the controller to teaching mode and set the robot to standby [ON] condition. If the robot is not in standby [ON] condition, check whether the arm is sufficiently fixated to avoid it from dropping. And then proceed to (3).
(2) Turn the main power [OFF] with the controller power [OFF].
(3) By removing the bolts from the V-axis motor bracket, remove the timing belt.
(4) Remove the R2-axis motor wiring of the arm frame, and remove the R2 motor.
(5) Remove the bolts from the locking/output part of the V-axis reducer..
(6) Mount a new V-axis reducer, and fasten the bolts at the locking/output part.
(7) Referring to [6.4.2], reassemble the R2-axis motor, and adjust the tension of the timing belt.
(Belt: 3GT / Width: 6 mm / Belt’s unit mass: 2.5 / Span length: 66 mm / Tension: 29 N)
(8) Adjust the tension of the V-axis timing belt..
(Belt: EV5GT / Width: 12 mm / Belt’s unit mass: 4 / Span length: 190 mm / Tension: 98 N)
(9) Referring to [6.4.2], connect the R2-axis motor cables of the arm frame, and put the cables in order..
(10) Confirm that there is no error in robot's motion.
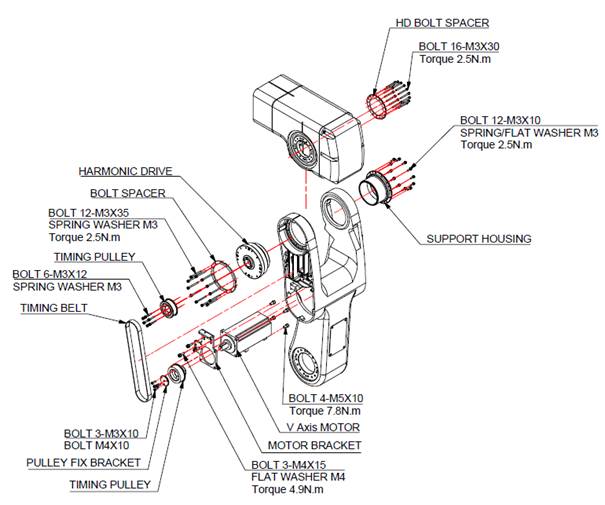
Figure 6.12 Axis-V Reducer Disassembly Diagram [HH007C]