6.4.3. Replacing Axis-S Reducer [HH007C]
6.4.3. Replacing Axis-S Reducer [HH007C]
(1) Set the controller to teaching mode and set the robot to standby [ON] condition. If the robot is not in standby [ON] condition, check whether the arm is sufficiently fixated to avoid it from dropping. And then proceed to (4).
(2) Turn the main power [OFF] with the controller power [OFF].
(3) Disconnect the motor wiring of the S axis, remove the bolts from the motor-mounting part, and remove the motor assembly from the body of the robot.
(4) Referring to [Figure 6.13], remove the bolts from the locking part of the S-axis reducer.
(5) Pull out the lower frame.
(6) Remove the bolts from the output part of the S-axis reducer.
(7) Before mounting the new reducer, apply Threebond to the part marked in red.

Figure 6.9 S-axis reduction gear Three Bond coating detail [HH007C]
(8) Apply 42 g of the grease (SK-1A) to the inside of the reducer in a thickness that matches the ball diameter of the wave generator.
(9) Mount the new reducer, and fasten the bolts at the output part of the lower frame.
(10) Fasten the bolts at the locking part of the S-axis reducer to the base body.
(11) Mount a new wave generator to the motor assembly that has been detached in (3).
(Apply a thin layer of grease to the outer diameter and the ball of the wave generator.)
(12) Referring to [6.4.2], mount the motor and connect the motor cables.
(13) Confirm that there is no error in robot's motion
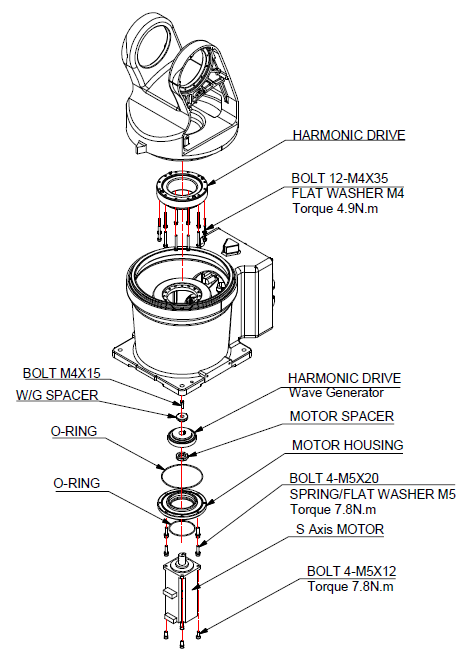
Figure 6.10 Axis-S Reducer Disassembly Diagram [HH007C]