4.8.3. Operation history
4.8.3. Operation history
This displays the operation history. This function displays the input content, the time, the program number at the time of input, the step number, the axis data, and the input/output state when signals related to operation, such as stopping of the robot, starting, and changing of the mode switch are inputted, providing the user reference information for robot maintenance and repair. The operation history’s default recording is 100 times and it can be recorded up to 1000 times by the user. History can be initialized by pressing the『[F1]: Remake』key.
(1) Selection『[F1]: Service』 → 『7: System diagnosis』 → 『3: Operation history』.

Figure 4.142 Operation history screen
(2) When a specific item is selected, and one of 『[F2]: Public input』, 『[F3]: Public output』, 『[F4]: Axis data』,『[F5]: Private input』or『[F6]: Private output』is pressed, the status at the time of relevant history generation can be verified. For example, if you select 『1: S-07 Mode switch is changed while in the auto operation』with the arrow key and press the 『[F6]: Private output』key, the following screen will be displayed.
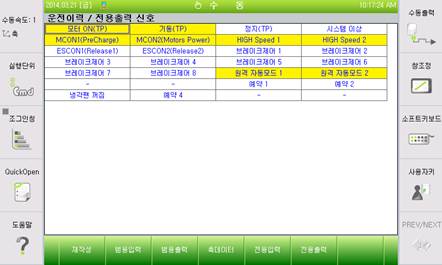
Figure 4.143 Operation history/private output signals

l Pressing the 『[F1]: Remake』key will bring up a dialog box for entering the maximum number of histories.
l The operation history holds up to 100 histories. However, the number of operation histories can be set within the range of 1~1000 depending on the needs of the user. When the user enters the maximum number of histories and presses [Enter], all the histories saved up to that point will be deleted, allowing new histories to be saved in the number set by the user.