8.2.6. Joint space
8.2.6. Joint space
In this example, robot’s role is doing spot-welding on the workpiece and intermittent tip-dressing. So, considering the layout of the workpiece and the tip-dresser, the robot’s S-axis can be limited to -40 ~ +95 deg. Set the space 1 as the working space for S-axis. (The setting of joint space doesn’t expressed on HRSpace 3D view.)

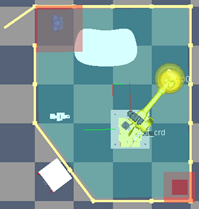
Figure 8.14 Robot poses when its S-axis value is +95 deg.(left) and -45 deg.(right)
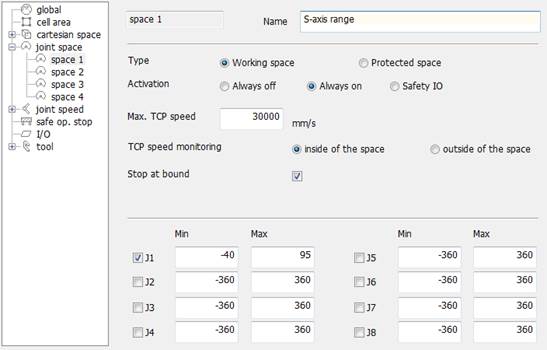
Figure 8.15 joint space setting