3.4.3. Hardware Functions
3.4.3. Hardware Functions
SafeSpace shall have the following hardware functions:
The safety integrity of SafeSpace is PL=d (SIL 2), Cat. 3., exceptionally STO function is PL=e (SIL 3), Cat. 3.
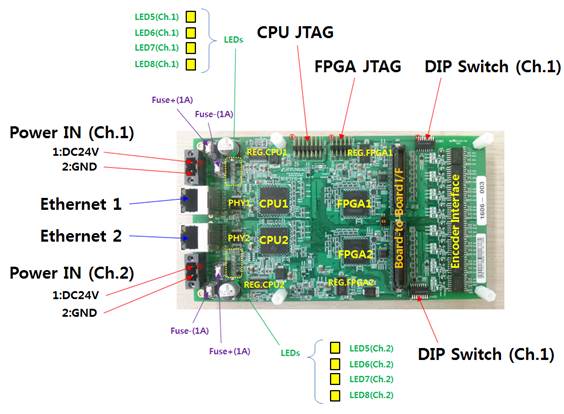
Figure 3.7 Internal Main Board in SafeSpace
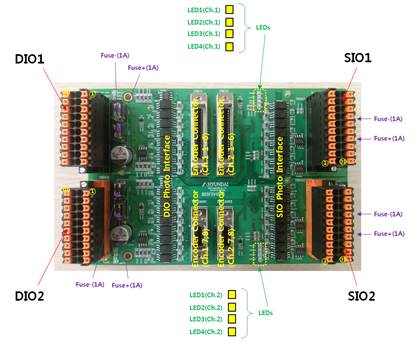
Figure 3.8 Internal Upper Board in SafeSpace
HF.1: Power Supply function
This function is to supply control powers in SafeSpace Module.
DC24V input is distributed to DC5V, DC3.3V, DC1.2V, DC2.5V by regulators with supervisor.
HF.2: Watchdog function
This function is to supervise a malfunction of CPUs. It uses the time-window-based watchdog pulse. If failed, CPU is reset, STO output of FPGA and STO buffer are shut down.
HF.3: Clock function
The clock is used in operation of the CPU, FPGA, Ethernet PHY. The clock source is from only one crystal oscillator. Using PLLs in the FPGA, this clock source is split various clocks for each component.
HF.4: CPU function
The CPU carries out safety-related functions and operates module.
HF.5: FPGA function
The FPGA consists in dual-port RAM for the channel interlock, serial-to-parallel data transformation part for acquiring a robot position, STO signal output for stopping the robot motion and shutting motors power down, general digital input/output part for interfacing an external safety PLC.
HF.6: Encoder I/F function (RS485)
The positions of a robot manipulator transfer to serial data by encoders in each axis. This serial data are transmitted to the robot controller via RS-485 line. This function of SafeSpace captures these data in middle and inputs to the FPGA for serial-to-parallel data transformation. That is to change RS-485 differential signals to single ended TTL logic signals.
HF.7: STO function and general purpose DIO
This function is to stop robot’s motion and turn motors power off if faults occur. For this action, CPU or FPGA output digital signal to the robot controller. This result is monitored with test-pulsed monitoring signal.
Target safety integrity level of this function is PL=e (SIL 3), Cat. 3.
Additionally, there are digital inputs / outputs for general purpose. These are used to exchange IO data with an external safety PLC. Target safety integrity level of these is PL=d (SIL 2), Cat. 3.
HF.8: Temperature Sensor function
The temperature sensors are used to monitoring temperature in module. If over-heated, all functions are shut down and STO signal is outputted to the robot controller by CPU.
HF.9: Ethernet function
This function is non-safety and to interface between the robot controller and SafeSpace. The SafeSpace needs many setting values normally to operate it’s functions. So the module receives these values from the robot controller and also transmits information via the Ethernet communication.
This part consists of EMAC module in CPU, Ethernet PHY, Ethernet transformer and connector.
