2.4.2. Sensor-based load estimation
2.4.2. Sensor-based load estimation
It is used to estimate the weight and center of the force control tool with the force sensor, which is unlike the existing one. If a sensor that does not use the force-control tool data is set, the force-control tool data would not be shown. Therefore, sensor-based load estimation would not available. The sensor-based load estimation can be executed in the following order.
(Press 『[F1]: Sensor-Based Load Estimation』 at the bottom of force-control tool data screen.)
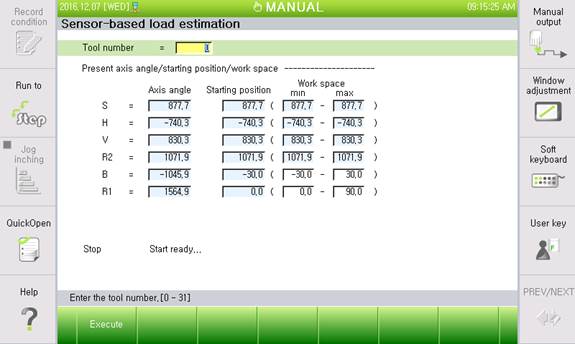
Figure 2.8 Sensor-based load estimation setting screen
① Enter a tool number to reflect the result of the load estimation.
② Enter the working area of axis B and R1. Only axis B and R1 operate for the load estimation so do not enter the working area for other axes.
Make sure that the robot does not interfere with any object within its periphery when setting it.
③ Turn on the motor using the [ENABLE] switch and then press 『[F1]: Execution』 key to perform the load estimation.
④ The result value is output after the load estimation is finished.
⑤ Press the 『[F7]: Exit』 key to set whether or not it should be reflected.
⑥ Check if the result is reflected to the set force-control tool number.
Note: The tool data and load estimation of the robot parameter handles any object attached to the robot flange as the tool data. Remember that the tool data / sensor-based load estimation exclusive for the operation tool attached to the sensor is different from the existing tool data / load estimation.