2.4.1. Force-control tool data
2.4.1. Force-control tool data
If you use a sensor that supports this function, the items would be as shown in Fig. 7. You would be required to enter the force-control tool data for accurate force control.
(『[F2]: System』 → 『4: Application Parameter』 → 『14: Force Control』 → 『2: Force-Control Tool Data』)
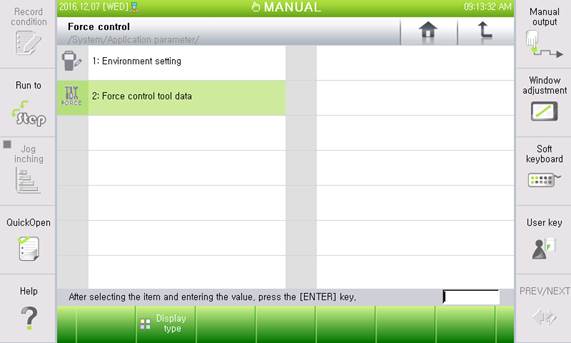
Figure 2.6 Force-control tool data menu
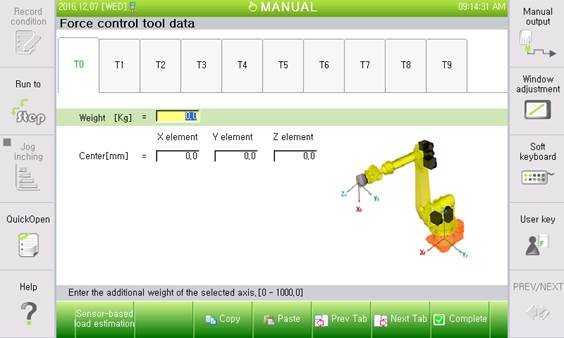
Figure 2.7 Force-control tool data screen
If you know the exact weight and center of the force-control tool data, you can directly input them. Input the position of the center based on the coordinate system of the end of the robot attached in the TP. If you do not have exact information on the force control tool, enter it using the sensor-based load estimation function. Up to 32 tool data can be saved, and existing tool data can be copied and pasted into other tool numbers.