7.6.4. Load estimation function
7.6.4. Load estimation function
The load estimate function is to acquire the mass and central position of the load attached at the front end of the robot. The Hi5 controller is based on the dynamics. Accordingly, when the activity is planned, the torque to be generated at each axis needs to be calculated, and, based on the calculation, the acceleration/deceleration needs to be planned also.
The mass, center of mass and inertia of each link of the robot’s main body is registered in the controller. However, in case of individual tools, the user needs to enter the values because the tools are attached because of the user’s purpose. If the mass and center of gravity of the tool are known already through the CAD data, the values can be entered directly by the user. The mass (kg), center and inertia of the tool can be entered ‘『[F2]: System』 →『3: Robot parameter』 → 『1: Tool data』’.
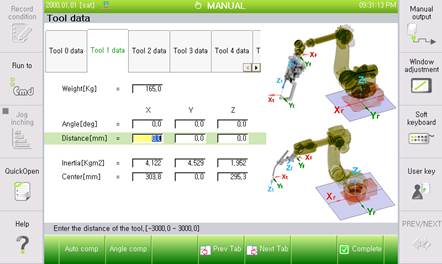
Figure 7.62 Tool data setting screen
However, generally, it is not easy to acquire the mass and center of gravity of the tool from the CAD data. Accordingly, we have the load estimate function, which calculates the dynamics data of the tool through the robot controller.

Figure 7.63 Tool data
7.6.4.2. Distance of center of gravity