7.6.8. Gravitation direction automatic setting
7.6.8. Gravitation direction automatic setting
As the Hi5 controller is based on the dynamics control, the gravitation direction setting is critical. Generally, the robot installation direction is perpendicular to the gravitational direction as shown below.
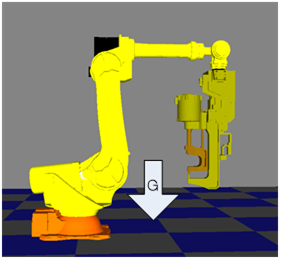
Figure 7.76 Gravitation direction of a robot on a ground surface
In a case in which the robot is installed in an inclined direction, not perpendicular to the ground surface, the gravitation direction should be set in the robot controller. In order for such setting, the gravitation direction automatic setting function is used.
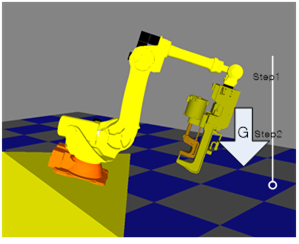
Figure 7.77 Gravitation direction of a robot on an inclined surface
In order to set the gravitation direction, a weight needs to be hanged externally to indicate the gravitational direction, and teaching about the two points (Step 1, Step 2) in the gravitational direction needs to be performed.
When the relevant program is selected and the execution key F1 is pressed, the direction vector will be calculated. When the completion key [F7] is pressed then, this direction will be set as the gravitation direction.
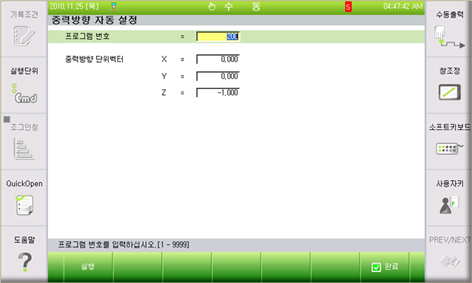
Figure 7.78 Gravitation direction selection results