7.2. mini TeachPendant
7.2. mini TeachPendant
Open popup menu to a robot in tree window.

Select mini TeachPendant. TeachPendant is a dialog box with key functions that are needed to teach and playback robots.
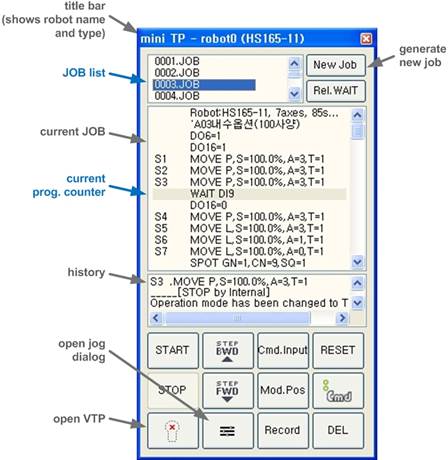
A picture above explains the structure and function of mini T/P. Names and functions of the most buttons are the same as those of an actual Hi5 Teachpandant.
JOBList
| It displays the list of all work files that are saved in the controller and displays current work as selected during play. If you click one of the work programs while teaching, the work program is selected as the current program and the contents of the program are displayed at the bottom. It displays popup menu that lets you delete or save work when you click the work with the right mouse button. |
Current job program | It displays the contents of the current program and the current program counter. You can move the program counter by clicking a certain command and edit relevant commands by double clicking the commands. |
History | This is an area where the history of Hi5 controller is displayed. In other words, it displays commands that were executed or error messages. |
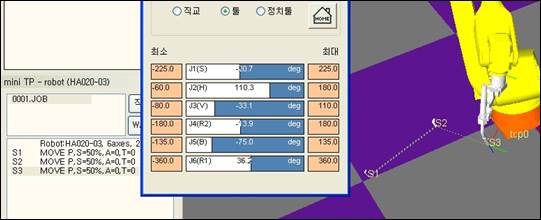
Open JOG dialog box
| This is a button that lets you to open JOG dialog box promptly. |
Open virtual T/P
| This is a button that lets you open virtual TeachPendant promptly. TeachPendant is explained in the next section. |



Click New Job button, enter JOB number, and press ‘OK’ button to create JOB.

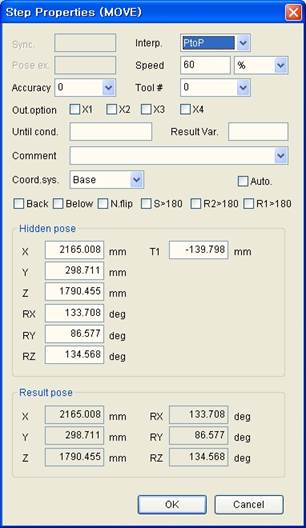
Now you can create steps by pressing ‘Record’ button while you move a robot with JOG dialog box. In this case, record coordinate system and step parameter depend on the settings in teach bar.

| Open Step Properties dialog box by double clicking a step if you want to edit the step parameters. You can edit it freely with values, variables/expressions and others.
Also you can edit the value of a hidden pose and when you select other coordinate system, the coordinate system transformation is automatically done on the pose value. (This is similar to the function of Quick Open Screen in Hi5 TeachPendant.)
For a hidden pose of an encoder type, axis degrees, pose expression, or hidden pose + shift variables, the cartesian coordinate’s value to this can be identified in Result pose. |
Edit Command Statement dialog box is displayed when you click Command Input button.
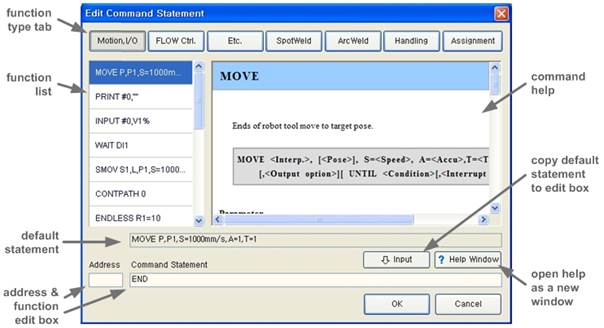
When you select a function type with a tab on the top, relevant commands are displayed on the left list. Help and a default statement are displayed when you select one command. Copy a default statement to the edit box by clicking ‘Input’ button, edit Command Statement by referring to Help, and click “OK’ button.
(You may type commands directly into the Command Statement edit box from the beginning.)
Open this dialog box by double clicking commands in mini TeachPendant if you want to modify functions that are entered or steps without hidden poses.
| Popup menu is displayed when you click the right mouse button on History. Logs can be deleted or turned on/off when there’re too many contents to be displayed. |
