7.1. Robot jog
7.1. Robot jog
You can move the robot with the jog window.
Right click on the robot of the tree window and open the popup menu.
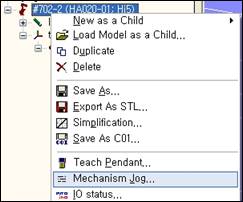
When you select the mechanism jog, the following jog window appears.
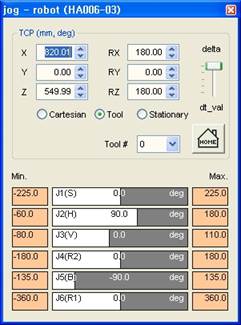
n Scroll bar
There’re 6 scroll bars for 6 axes in a robot and additional scroll bars whose number is the same as the total number of additional axes if there’re any. The degree of each axis is displayed in the center of the scroll bar. It also displays the minimum and maximum values that each axis can move.
By operating the scroll bar, you can move each axis of the robot independently. For a parallel robot, the maximum/minimum value of V axis is dependent on the H axis.
When you press [ENTER] key, it displays a dialog box that you can edit the value of selected axes. Type numeric values by using a keyboard and press [ENTER] key to complete the editing.

You can also edit Softlimit if you double click the minimum and maximum values of each axis.

n TCP
The location and direction of the TCP(Tool Center Point; Robot tool end) is shown on the right side of the TCP window. You can move the TCP in grid coordinate method by pressing the spin button of each item of X, Y, Z, RX, RY and RZ. Or you can move the up/down cursor key on the keyboard or rotate the mouse wheel up/down after left clicking the edit box of each item.
(It is increased by the value that is specified in delta slider.)
Also you can directly enter the value of each axis with the keyboard and hit Enter or select other edit box to reflect the value.
n HOME button
By clicking the HOME button, the robot will be positioned in HOME location (Default position).
n Cartesian / Tool / Stationary
① When operating each axis of X, Y, Z, RX, RY and RZ of TCP, you can select which coordinate to be based on.
Select the ”Cartesian” and operate the TCP to shift the tool end based on the robot coordinate.
② When you select the “Tool” and operate the TCP, the tool end will shift based on the coordinate of the currently selected tool.
③ When you select the “Stationary” and operate the TCP, the work piece held by the robot will shift based on the coordinate of the currently selected stationary tool.