3.6.1. Error detection
3.6.1. Error detection
When one of the robots stops from an error caused from an arm interference error or soft limit, the robot stops keeping its current position. Even when the error is caused by the slave, the master also stops the operation.
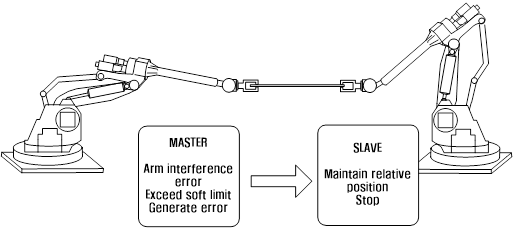
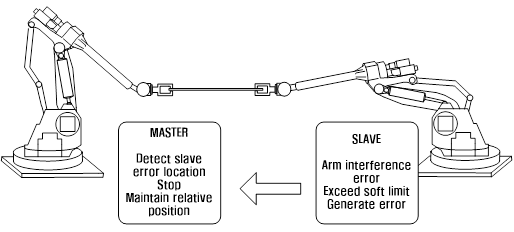
Figure 3.5 Error detection