3.4. Cooperation Traverse Axis Jog
3.4. Cooperation Traverse Axis Jog
Cooperation traverse axis jog is the same operation as the general cooperation jog. If you operate the master robot on the traverse axis in cooperation jog condition, as shown in Figure 3.5, the slave robot will adjust and move to the relative position of the traverse axis.
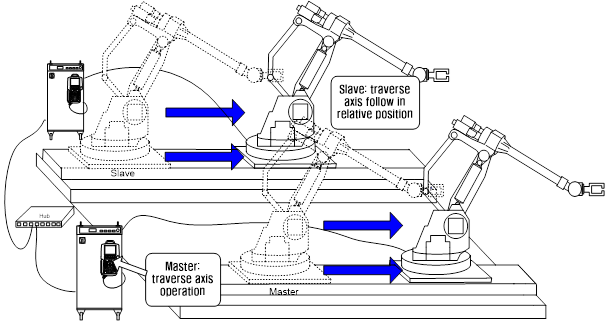
Figure 3.3 Cooperation traverse axis jog
Caution
l The traverse axes of the master and slave robot for cooperation control system must be installed in parallel, as possible.
l Cooperation control traverse axis system only supports one axis.
l For cooperation traverse axis function, the main axis calibration function must be used prior to the operation.