2.3.3. Traverse axis system
2.3.3. Traverse axis system
When composing a traverse axis system for cooperation control, the traverse axes with same specification must be installed in parallel as possible.
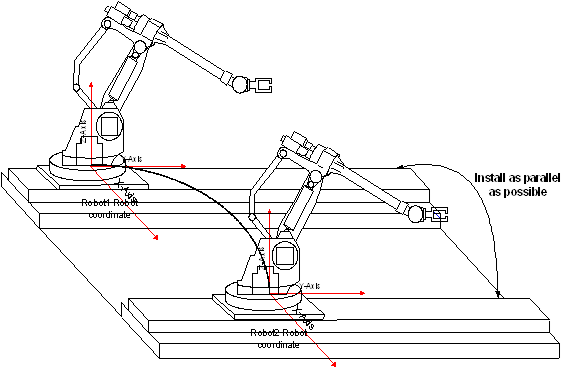
Figure 2.4 Measures to be taken when the external emergency stop for P-Com input is not used
Caution
l For system with a main axis, set the specification of the traverse axis to ‘arbitrary’ and use it after traverse axis calibration.
l The traverse axes need to be installed in parallel to each other as much as possible.
l If the synchronization error increases as the robot moves along the traverse axis, this can be from inaccurate calibration of traverse axis.
l For details on the traverse axis calibration function, please refer to 『Hi5 Controller operating manual』.
l Traverse axis calibration must be set for both master and slave.