2.3.1. Introduction to common coordinate setting
2.3.1. Introduction to common coordinate setting
For cooperation operation, the installed position among robots must be accurately known. The robot controller calculates the position of the end of the tool based on the base coordinate, and the information of the counterpart robot should be registered additionally. The information regarding the positions of the robot is to be made through the setting of the common coordinate.
Set the common coordinate to mutually identify the position of robot 1 and robot 2. (Figure 2.2) It can be set by teaching 3 same points in the area for each robot.
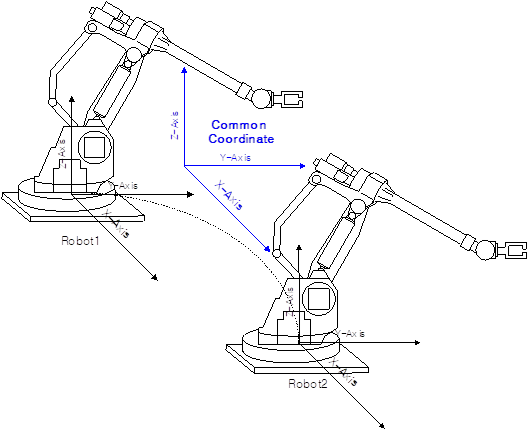
Figure 2.2 Common coordinate setting among cooperation robots