2.3.2. Setting common coordinate for 2 or more robots
2.3.2. Setting common coordinate for 2 or more robots
The common coordinate for the cooperation robot must be set with same points among the robots. Therefore make sure all the robots are pointing to the same point. Therefore if the robots are far spread out, it is impossible to set a common coordinate. For such cases, you can create a separate tool to teach the same points to the robots.
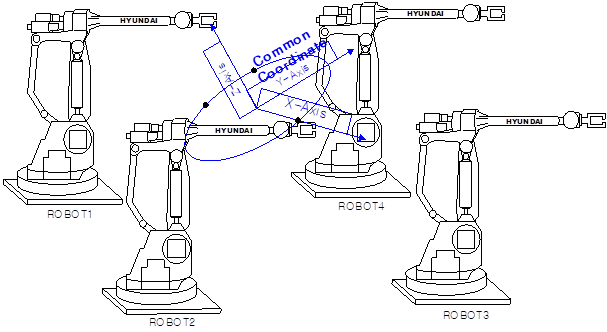
Figure 2.3 Setting common coordinate for 2 or more robots
Caution
l Prior to the setting of the common coordinates, the calibration (Auto integer setting) of the robots should be performed first.