2.5.1. Timing chart
2.5.1. Timing chart
The timing charts are displayed for a case in which there is no power saving state, in other words, for a case in which the command can be executed immediately.
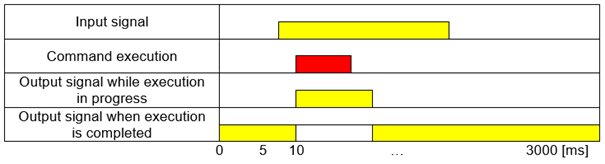
(1) MOVE command normal ending
The following table shows timing charts for a case in which the Move command independent execution ends normally. The input signal needs to be maintained in the on state continuously until reaching the recorded position.
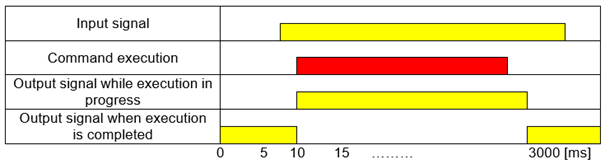
(2) Stop input while the Move command execution in progress
The following table shows charts for a case in which stoppage occurs as the input signal is turned off while the Move command independent execution is in progress (Moving to the recorded position). The output signal will be turned off immediately while the execution is in progress, and the execution completion output signal will not be turned on.
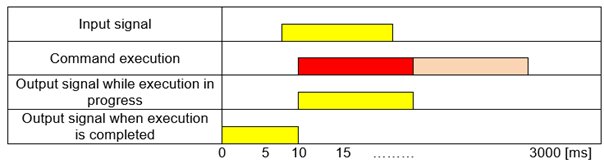
(3) Normal ending of other commands
The following table shows timing charts for a case in which other commands, not the Move command, are ending normally.