2.4. Command independent execution setting
2.4. Command independent execution setting
Users need to set the conditions for using the function. It is required to register the TaskStart command for the independent execution of the tip dressing and gun search programs for G1 and G2. It is required to register the Move command for moving to a designated position in relation to P1.
The TaskStart command is for executing multiple tasks. Refer to Multitasking Function Manual separately for more details. However, the command will be executed independently at subtask 1, TaskStart SUB=1 cannot be used.
Set through the screen of [System/Application Parameter/Command independent execution] as shown below
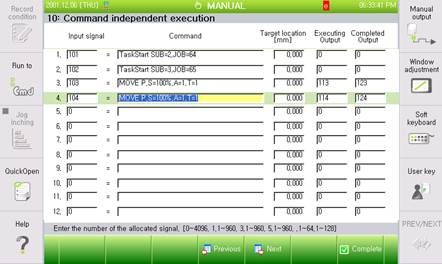
Input signal | The number of the input signal that will execute the command |
Command | A command that will be executed independently |
Target position | A target position for a command that will be executed after moving to the specific position. |
Output signal while execution in progress | Output while the relevant command is being executed. |
Output signal when execution is completed | Output when the relevant command is completely executed. |
n TaskStart SUB=2,JOB=64
When the relevant input signal (DI101) is fed, 0064.JOB (A program for tip dressing and gun search for G1) will be executed independently of the operation program of the robot.
n MOVE P,S=100%,A=1,T=1
When the relevant input signal (DI103) is fed, P1 will move to a position, as well as in the condition, as recorded in the Move command, independently of the operation program of the robot. However, when it comes to the conditions for moving, the interpolation type will change to P and the accuracy will change to 0 automatically