13.2. MOVE - step pose
13.2. MOVE - step pose
(1) Click [Quick Open] key in MOVE command.
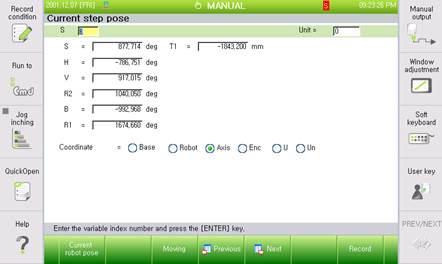
Figure 13.2 Quick Open of MOVE
(2) Display the current step pose.
- In order to change a pose, it is required to move by using the cursor and press the [ENTER] key. The content Inputted will be recorded after entering the number and pressing [ENTER] key.
- More than one solution exists in the robot type in terms of robot mechanism characteristics for describing the robot position. Therefore, the designation of robot type is required for describing the type uniquely. Use [SHIFT] + [←] [→] when designating the robot type by selecting one of < > item.
- The setting should be completed by pressing 『[F7]: Record』key in order to apply the setting to the program. The setting will not be applied to the program when completing the setting by pressing 『ESC』.