1.7.1. Safety Fence
1.7.1. Safety Fence
| Install safety fence against the possible collision between the robot and workers, so that no worker may approach the robot. |

Install safety fence against the possible collision between the robot and workers, so that no worker may approach the robot. When operators or other personnel enter the robot's working envelope by accident, it may cause an accident. Install the safety fence to stop the robot when one, who intends to replace for TIP DRESSING or TIP changing replacement, or to inspect welding equipment, opens the fence gate and approaches the equipment during operation.

Figure 1.1 Recommended size for safety net and entrance gate (slot type entrance gate)
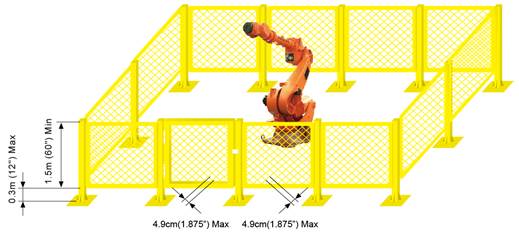
Figure 1.2Recommended size for safety net and entrance gate (square type entrance gate)
(1) Enough space for safety net should be secured by covering robot operating area so as that workers would not have difficulty in teaching work or repairing work, and the safety net should have solid structure in order that it would not move easily and man cannot enter over easily.
(2) Safety net should be installed by static type in principle, and should not have hazardous parts such as prominence and depression or keen part, etc.
(3) Install the safety fence with an entrance gate, and register the safety plug at the gate so that it does not open unless pulling the plug out. Wiring should be carried out in a way that the robot should be in the operation ready OFF status as well as in the motor OFF status when the safety plug is pulled out or safety net is open.
(4) In order to operate the robot with the safety plug pulled out, wiring should be carried out in a way that will allow the playback to take place at a low speed.
(5) The emergency stop button should be installed at a place where it can be pushed quickly by the operator.
(6) If no safety net is to be installed, devices such as photoelectric switches, and mat switches, should be installed, instead of the safety plug, to cover the overall area within the robot’s operation range in a way that the robot can be stopped automatically when a person enters the robot’s operation range.
(7) Operation area of robot (hazardous area) should be distinguished by the method like painting on floor.