2.1.4. Setting a common coordinate system for the jig robots
2.1.4. Setting a common coordinate system for the jig robots
For cowork, the correct relative locations of the robots should be identified. Because the operating range of a jig robot seldom intrudes into that of another, and because a jig robot moves only in right-angle directions (X, Y, and Z), the common coordinate system may be set as (0,0,0).
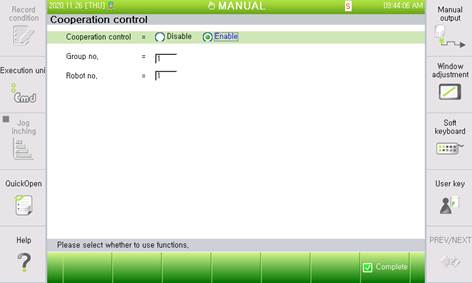
(1) Reboot after selecting ‘Enable’ in 『[F2]: System』 → 『2: Control parameter』→『9: Network』→『3: Service』→『1: Cooperation control』
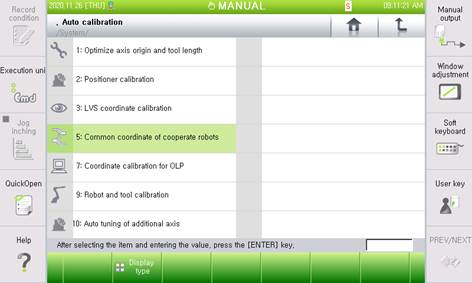
(2) In the manual mode, select “[F2]: System” → “6: Auto calibration” → “5: Common coordinate of cooperate robots”
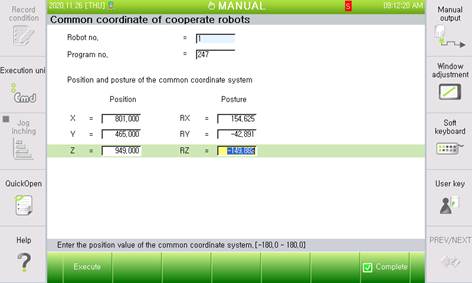
(3) On the “Set cooperative robot common coordinate system” window, enter the robot numbers and the program number, and enter the locations and positions of the common coordinate system.