2.1.1. Setting the initial system for the jig robots
2.1.1. Setting the initial system for the jig robots
Set the additional axes, mechanism, etc. for the cooperative control of the jig robots.
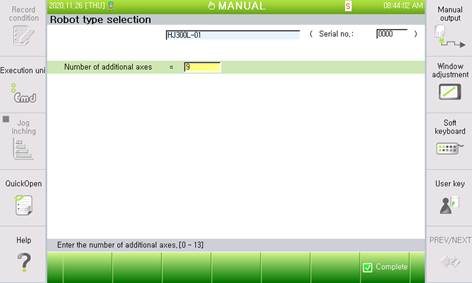
(1) In the manual mode, “[F2]: System” à “5: Initialize” à “2: Select robot type.” à “4: Special type
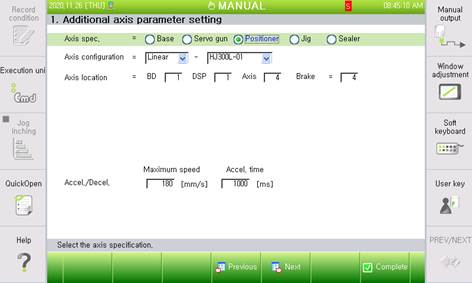
(2) Select “5: Set additional axis parameters.”
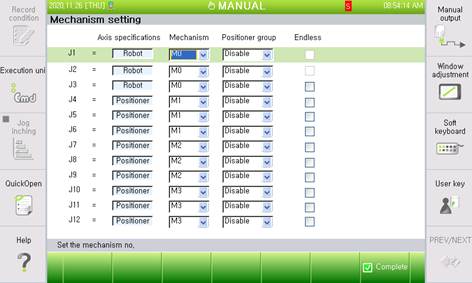
(3) Select “6: Set mechanism.”
(4) The above parameters have the following purposes:
n Set the number of additional axes in “2: Select robot type”: Because jig robots are 3-degree of freedom robots, setting the number of additional axes at 9 will select three additional jig robots. To add one jig robot, set the number of additional axes at 34.
n “5: Set additional axis parameters”
Axis specification: Click the Shift key, and set the positioner by clicking the arrow keys.
Axis composition: Select the straight movement direction, and select the pertaining model.
n “6: Set mechanism”
(J1.J2.J3) = M0 (Jig Robot 1): “2: Select robot type” Three axes of Jig Robot 1
(J4.J5.J6) = M1 (Jig Robot 2): Three axes of Jig Robot 2 according to the number of additional axes
(J7.J8.J9) = M2 (Jig Robot 3): Three axes of Jig Robot 3 according to the number of additional axes
(J10.J11.J12) = M1 (Jig Robot 4): Three axes of Jig Robot 4 according to the number of additional axes