2.1.2. Jog function axial/Cartesian coordinate system
2.1.2. Jog function axial/Cartesian coordinate system
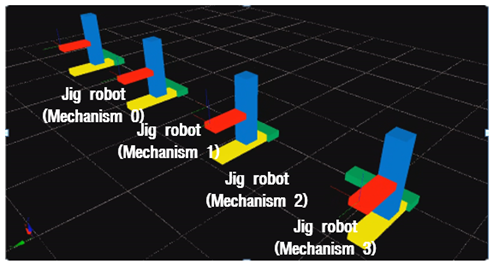
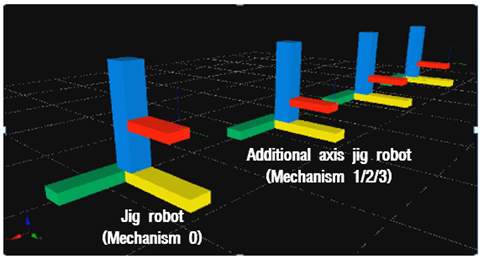
This section describes the jog function that an axial or Cartesian coordinate system sets for the motion of four jig robots.
(1) In the manual mode, click the “Coordinate system” button, and set it at the axial coordinate system.

(2) Clicking the Motor On key and the arrow keys will only move the M0 (Mechanism 0) jig robot.
(3) In the manual mode, click the “Coordinate system” button, and set it at the cartesian coordinate system.
(4) Clicking the Motor On key and the arrow keys will move all the jig robots.