2.1.3. Setting the operating program
2.1.3. Setting the operating program
This section describes how to set the operating program for moving the jig robots.
(1) In the manual mode, write the robot program.

(2) In the written program, move to the step to be modified, and click the “Quick Open” button.
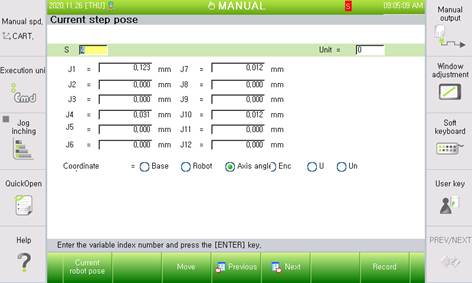
(3) On the TP window, click the “Cartesian” button, and click the Motor On key to run the program. 
(4) In the manual mode, clicking the arrow keys after Motor On will move all the jig robots.